|
Sviluppo
driver Tutti i
software Cnc proposti nel nostro sito utilizzano una tecnologia molto
avanzata per generare gli impulsi di step e direzione per
ogni singolo asse. Il software di interfaccia utente viene realizzato
con Visual C++ con l'utilizzo di MFC (Microsoft Foundation Classes),
mentre il generatore di impulsi e' realizzato con un driver che viene
eseguito @Ring0 (Livello di massima priorita'). Tale architettura
permette prestazioni eccezionali, garantendo accelerazioni e velocità
degli assi con grande accuratezza. L'interfaccia utente è sviluppata a
livello User Mode, mentre il driver e' sviluppato in Kernel
Mode e quindi in Real Time. Molti software Cnc sono
sviluppati utilizzando un linguaggio a livello User Mode, e tale
tecnologia non assicura temporizzazioni accurate poichè i
messaggi devono fluire attraverso i vari layers del Sistema operativo,
fino ad arrivare al driver di default del sistema operativo stesso.Si
possono verificare i limiti di tale tecnologia muovendo il mouse mentre il software Cnc
sta eseguendo una lavorazione: si udiranno variazioni sui motori e se
essi non hanno sufficiente coppia si avra' l'arresto dell'asse. Tale
problematica puo' essere avvertita anche durante l'accesso al disco
rigido.Lo sviluppo di software Cnc a livello User Mode crea una rete con
un ritardo non controllabile, e tale variabile di ritardo dipende dal Sistema
operativo in uso e dalle applicazioni che esso sta gestendo. La
scrittura di drivers elimina tale ritardo, avendo cosi' la possibilita'
di gestire direttamente la risorsa hardware che vogliamo controllare,
senza "ingerenze" del S.o. La comunicazione tra il driver ed
il software avviene tramite funzioni apposite definite in fase di
progettazione della nostra architettura. Quindi il driver dovra'
allocare memoria necessaria per posizionare i valori gestiti dal driver,
che saranno disponibili al software attraverso la chiamata a funzioni di
tipo IOCTL. La
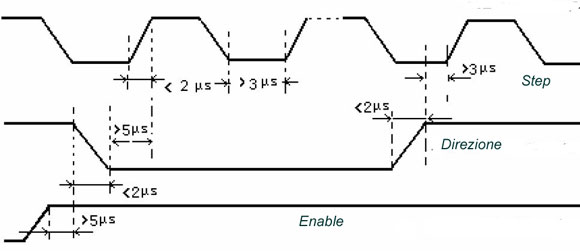
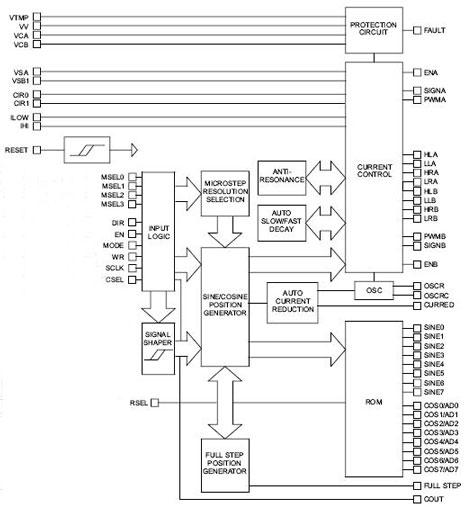
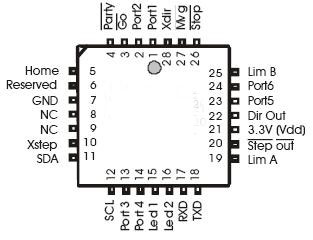
scrittura di un driver richiede la conoscenza approfondita del
dispositivo hardware che si sta controllando, poiche' il driver si
occupa delle temporizzazioni sulle varie linee del dispositivo, oppure
la gestione dei vari registri del dispositivo. Inoltre, la scrittura del
driver preclude la conoscenza approfondita del S.o. in uso, anche se la
tendenza attuale e' quella di utilizzare un appropriato sistema di
sviluppo che permette la compilazione del driver in funzione
dell'ambiente di destinazione. Personalmente ho sviluppato drivers in
ambiente Windows, compilando quindi il driver su varie piattaforme
Win3.11, Win98 (driver .VXD) e Windows XP/2000/2003 (driver .sys). La
Microsoft mette a disposizione un kit per lo sviluppo di driver,
gratuitamente e puo' essere richiesto direttamente dal sito www.microsoft.com
DDK (Driver Development Kit). Il
Debag del driver risulta una fase delicata e critica poiche' se il
driver presenta errori si possono arrecare danni all'intero s.o. Per il
debug si consiglia l'utilizzo di 2 Pc collegati tramite porta seriale,
dove l'Host tiene il sistema di sviluppo ed il software di debug, mentre
il Target viene utilizzato per testare il driver. Tramite un buon
software di debug si puo' controllare il Target, bloccare l'esecuzione
del driver e leggere lo stato dei registri del micro e seguire le
istruzioni che compongono le procedure del driver. Una
volta testato il driver deve essere preparato un file per poter caricare
il driver sul sistema operativo in uso, pronto per la sua distribuzione
(.inf). Poiche'
l'architettura del microprocessore e' notevolmente cambiata a causa di
aumento di prestazioni e dispositivi aggiuntivi integrati nella Cpu, si
consiglia di consultare il sito Intel e leggere i 4 volumi concernenti
l'architettura del micro e la sua programmazione, ponendo particolare
attenzione al dispositivo Apic locale e la gestione di Interrupt senza
il tradizionale 8259. Anche il timer 8253/54 e' stato soppiantato dal
velocissimo timer integrato nell'Apic.(The IA-32 Intel architecture
software developer's Manual -Letteratura Intel). Quindi
lo sviluppo di un driver permette di gestire direttamente il dispositivo
hardware, gestire locazioni di memoria, registri e Interrupts dei vari
dispositivi quali porte seriali(Irq4), porte parallele(Irq 7), Timer di
sistema (Irq0) ecc.@ Ring 0, cosa non permessa @ Ring3 tipica di
software .exe in quanto a tale livello non sono permesse alcune
operazioni per problemi di stabilita' del s.o. La coscienza di poter
utilizzare qualsiasi istruzione @ Ring 0 prevede una ottima conoscenza
dell'hardware e dell'architettura del micro per cui il driver e'
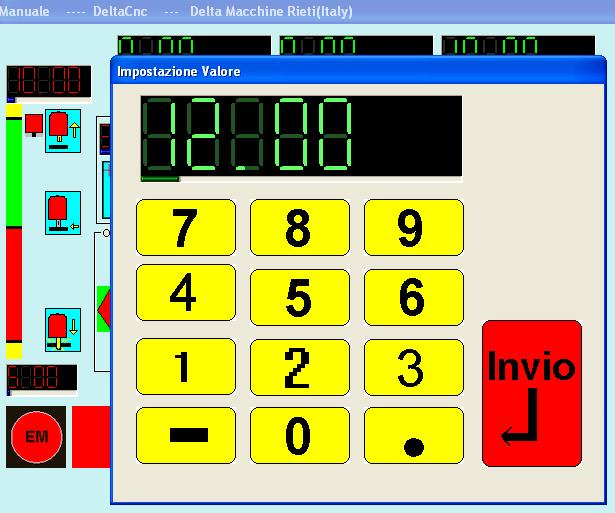
destinato. Per
valutare la qualita' dei drivers realizzati, e' possibile scaricare i
software : DeltaCnc Demo per la gestione dei motori a passo e DeltaEncoder
Demo per leggere e convertire gli impulsi provenienti da un
encoder. Una volta istallato il software demo, i files Delta1.pdf e
Delta2.pdf forniranno tutte le specifiche per l'interfacciamento.(Tali
software saranno disponibili sul sito prossimamente). Il
driver puo' essere adattato per controllare qualunque sistema di
posizionamento, utilizzando le funzioni di uso generale. Su richiesta e'
possibile implementare funzioni specifiche per il controllo,
movimentazione e posizionamento di sistemi. Tramite il driver e'
possibile generare impulsi di spostamento, acquisire lo stato di
sensori, controllare encoders, il tutto in Real Time. In definitiva, il
driver sviluppato, si presta ottimamente nella gestione di linee di
automazione e controllo, movimentazione macchine utensili, sistemi
automatici di verniciatura, sistemi automatici di dosaggio, sistemi di
manipolazione ecc. Anche
il software di interfaccia a livello UserMode (.exe) e' personalizzabile
secondo l'applicazione che si vuole realizzare, avendo gia' in libreria
tutte le funzioni per la comunicazione con il driver. Tale approccio
riduce al minimo i tempi di sviluppo di applicazioni custom, evitando
quindi tempi per la scrittura del driver, test ed integrazione con
l'eseguibile. L'intero prodotto (driver+software) e' dedicato alle
risorse R&D delle aziende. I
testi sono soggetti a copyright, ed appartengono a Delta Macchine di
Mostarda N. e non sono utilizzabili per proprie documentazioni, ne
totalmente ne parzialmente senza mia autorizzazione scritta. Mostarda
Nazzareno 01/08/2005 |