






















Il modello uno nasce per scopi didattici sua struttura in alluminio e di motori a passo garantiscono prestazioni eccellenti e nello stesso tempo
contenuti costi di produzione
Ideale per scopi didattici nell'ambito di università ed istituti tecnici
Con un piccolo investimento è possibile esplorare il mondo dei bracci antropomorfi e della loro programmazione
I 6 gradi di libertà della struttura garantiscono movimentazioni e posizionamenti complessi
Il modello 2 nasce per uso industriale la sua struttura solida lo rende ideale in processi produttivi continui grazie ad un sistema interno di
ingranaggi che supporta lavori gravosi. Tale modello è equipaggiato con motori brushless con encoder di potenza adeguata, conferendo al robot
movimenti fluidi ed eleganti.
Le sue dimensioni generose soddisfano gran parte delle esigenze di mercato, permettendo di svolgere operazioni ripetitive all'interno di processi
industriali produttivi. Il controller in dotazione permette di interpretare codici ISO oppure può essere impostato per autoapprendimento, rendendo
così facile anche la sua programmazione. Può trovare applicazioni nei settori industriali più disparati quali:
Saldatura automatica
Verniciatura
Manipolazione e packaging
Taglio
Fresatura
Il controller a 10 assi permette di aggiungere ulteriori assi , permettendo di montare il robot su asse lineare motorizzato
Altra preziosa peculiarità del controller e la capacità di implementare la visione artificiale quando le traiettorie non sono predeterminate , ma
dipendono dalle condizioni ambientali di contorno
La solida struttura della macchina, la precisione dei meccanismi interni è l'unità di controllorendono il dispositivo un utilissimo strumento di
lavoro anche per piccole realtà produttive
Il nostro controller CNC CriControl480 è stato arricchito con il modulo di gestione per bracci antropomorfi 6 o più assi.
All'interno del software è stata implementata tutta la matematica relativa alla cinematica diretta ed inversa.
La matematica diretta permette di impostare l'angolo di ogni singolo snodo , per poi conoscere la posizione dell'utensile montato su robot,
rispetto ad un riferimento cartesiano tridimensionale (spazio cartesiano).
Impostando i vari angoli, inoltre, siamo in grado di conoscere anche l'angolo che l'utensile forma con gli assi cartesiani, sui vari piani xz ed yz.
La cinematica inversa, al contrario, ci permette di conoscere i valori degli angoli dei vari snodi del robot, conoscendo solamente la coordinata
spaziale dell'utensile nello spazio cartesiano e l'angolazione che deve avere l'utensile rispetto agli assi. Se vogliamo che l'utensile sia portato in
una certa coordinata dello spazio, in realtà abbiamo infinite suluzioni impostabili sui motori dei singoli snodi che soddisfano tale condizione.
È per questo che abbiamo individuato un algoritmo che ponga delle condizioni al contorno, in modo da avere una sola soluzione. Tali condizioni
consistono nel fissare gli angoli che l'utensile deve formare con gli assi cartesiani.
Inoltre l'algoritmo è velocissimo nel calcolare la soluzione, utilizzando tecniche di calcolo numerico, le quali ci permettono di individuare la
soluzione molto velocemente,tramite approssimazioni successive.
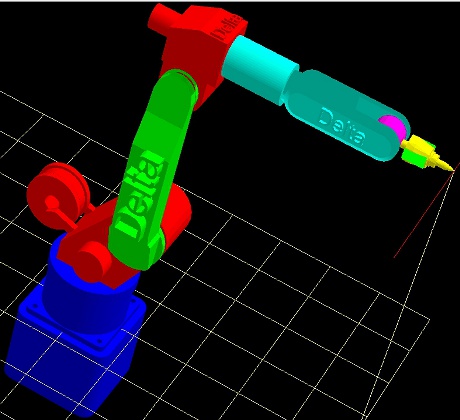
La simulazione è affidata a modelli STL, quindi modificabili con qualsiasi CAD 3d.
Il software, dal modello STL, ricalcola automaticamente la geometria ed adegua le funzioni di cinematica diretta ed inversa, quindi adattabile a
qualunque geometria della meccanica di costruzione del robot.
Abbiamo sviluppato anche un programmatore/simulatore in Visual Basic stand-alone per la programmazione e simulazione offline.
Inoltre è possibile disegnare in 3d il pezzo in lavorazione ed inserirlo all'interno della cartella del software, in modo da poter effettuare sia la
simulazione che la programmazione offline.
Tale caratteristica è implementata sia su CriControl che sul simulatore offline.
Inoltre il controller CriControl480 ha un'interfaccia estremamente intuitiva per le funzioni di autoapprendimento, generando automaticamente un
file che permette la riproduzione della traiettoria acquisita ed il controllo di tutte le attivazioni e disattivazioni (attuatori) presenti sul robot.
La funzione di autoapprendimento è frequentemente utilizzata in processi di saldatura MiG e Tig, portando il robot sui vari punti di inizio e fine
saldatura, ottenendo un file di lavorazione pronto per la produzione.
Il modulo robot può essere affiancato da algoritmi di visione artificiale che permettono il riconoscimento di forme precedentemente acquisite
tramite telecamera, funzione fondamentale in situazioni di manipolazione di oggetti.
Infine la gestione di cambio pallet permette una produzione continua, senza interruzioni.
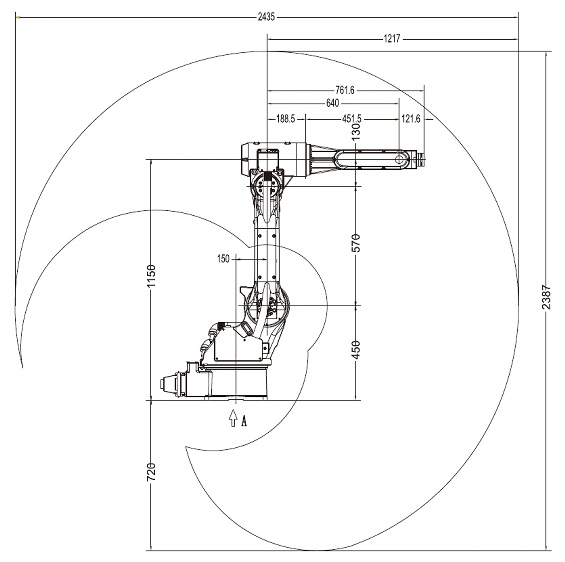
Braccio per utilizzo industriale
Braccio antropomorfo 6 assi
Peso:200Kg (base esclusa)
Portata al polso: 12Kg
Riduttori interni secondo specifiche del cliente
Motori Brushless
Braccio antropomorfo 6 assi Mod. Study
Braccio per scopi didattici
Braccio antropomorfo 6 assi
Diametro d'azione: 1400mm
Portata al polso: 2Kg (Optional 4Kg)
Numero assi:6
Riduttori interni secondo specifiche del cliente (optional)
Motori Stepper
Box Elettronica
Tablet 8" con software di gestione
Prezzo: 5950,00 euro completo di motori stepper maggiorati (4Kg al polso)
*Prezzo riservato a scuole, università e centri di formazione
Robot per saldatura automatica 7 assi
Mod.15-10
Raggio max:1500mm
Portata al polso: 10Kg
Peso:220Kg
Mod.12-05
Raggio max:1200mm
Portata al polso: 5Kg
Peso:180Kg
Robot parallelo per utilizzo industriale
Numero assi: 4
Dimensioni:su specifiche del cliente
Riduttori interni secondo specifiche del cliente
Motori Brushless o Ibridi
Velocità di posizionamento elevate
Telecamera con visione artificiale per
riconoscimento delle forme
Programmazione parametrica con valori di offset e
rotazione acquisiti tramite telecamera
Cinematica diretta ed inversa integrata sul nostro
controllo numerico Delta8-Robot
Programmazione da cam oppure tramite
autoapprendimento
Prezzo contenuto
Robot Mod.3010
Diametro di lavoro:3000mm
Portata al polso:10K
Peso: 225Kg
Riduttori a gioco zero